


Mis en ligne le : 31/10/2025
SEACAT
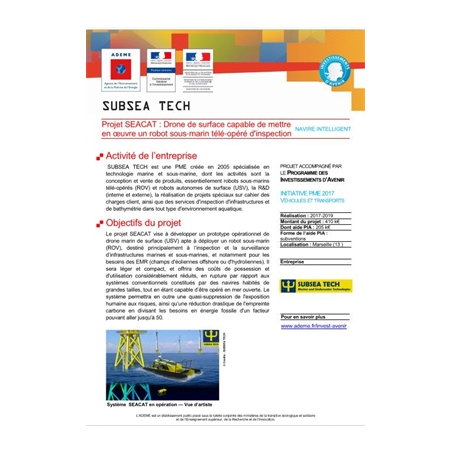
Drone de surface capable de mettre en oeuvre un robot sous-marin télé-opéré d'inspection
Présentation
Le projet SEACAT vise à développer un prototype opérationnel de drone marin de surface (USV) apte à déployer un robot sous-marin (ROV), destiné principalement à l'inspection et la surveillance d'infrastructures marines et sous-marines, et notamment pour les besoins des EMR (champs d'éoliennes offshore ou d'hydroliennes)
Lire la suite
Caractéristiques
- Date de mise en ligne
- 07/03/2018
- Type de document
- Retour d'expérience
- Nb. de pages
- 1 P
Présentation
Le projet SEACAT vise à développer un prototype opérationnel de drone marin de surface (USV) apte à déployer un robot sous-marin (ROV), destiné principalement à l'inspection et la surveillance d'infrastructures marines et sous-marines, et notamment pour les besoins des EMR (champs d'éoliennes offshore ou d'hydroliennes)
Caractéristiques
- Auteurs
- ADEME
- Public(s)
- Monde de la recherche
- Type de document
- Retour d'expérience
- Thématique
- Industrie et production durable
- Collection
- Ils l'ont fait
- Date d'édition
- 01/2018
- Date de mise en ligne
- 07/03/2018
- Nb. de pages
- 1 P
- Langue
- Français
Découvrez aussi

Mis en ligne le : 29/04/2025

Mis en ligne le : 28/05/2025

Mis en ligne le : 28/05/2025





